
摄像头测距方案
该应用基于 Quectel Pi H1 智能主控板,通过双目摄像头采集画面,在预览界面点击目标区域,测量摄像头到目标物体的真实世界距离。
该应用通过调用双目摄像头同时采集左右目画面,利用双目视差原理计算目标距离,并提供了摄像头标定、参数调节等辅助功能,可作为双目测距、立体视觉及机器人视觉导航类应用的参考示例。
- 案例描述
- 资源准备
- 快速上手
- 应用演示
该应用基于 Quectel Pi H1 智能主控板,通过双目摄像头采集画面,在预览界面点击目标区域,测量摄像头到目标物体的真实世界距离。
该应用通过调用双目摄像头同时采集左右目画面,利用双目视差原理计算目标距离,并提供了摄像头标定、参数调节等辅助功能,可作为双目测距、立体视觉及机器人视觉导航类应用的参考示例。
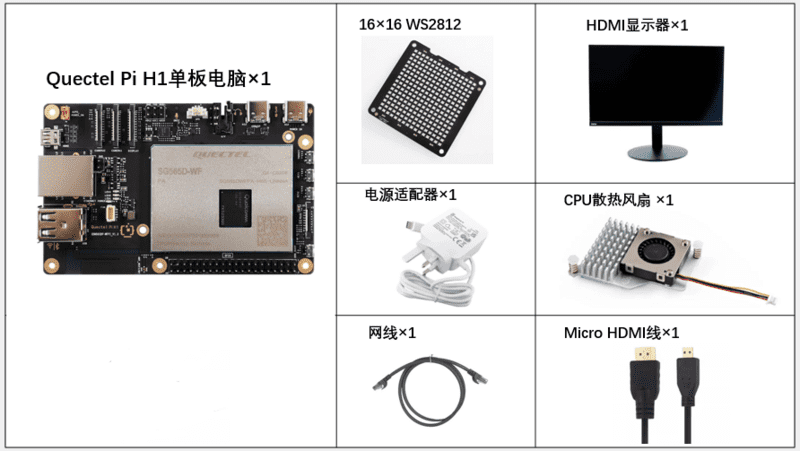
开发配件清单
| 配件名称 | 数量 | 规格参数 |
|---|---|---|
| Quectel Pi H1 智能主控板 | 1块 | Quectel Pi H1智能主控板 |
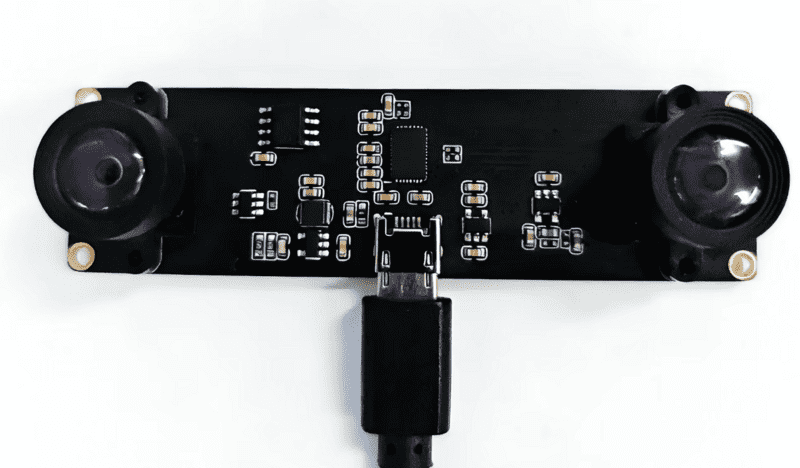
| USB 双目摄像头 | 1个 | 推荐分辨率:2560×720(左右各1280×720);输出格式:YUYV/MJPG |
| USB-C 电源线充电器 | 1个 | 27W USB Type-C接口充电器 1.2米线长中规电源PD电源 适用于树莓派5代 |
| USB-C DP 显示线/HDMI 线 | 1根 | 规格:DP 1.4;线长:1m;接口:USB-C(公头)- USB-C(公头) 规格:HDMI 2.0;线长:1m;接口:HDMI-A(公头)-HDMI-D(公头) |
| CPU 散热风扇(可选) | 1个 | 树莓派5代官方原装散热器带导热贴 |
| 显示屏 | 1个 | 24英寸 HDMI 显示器 |
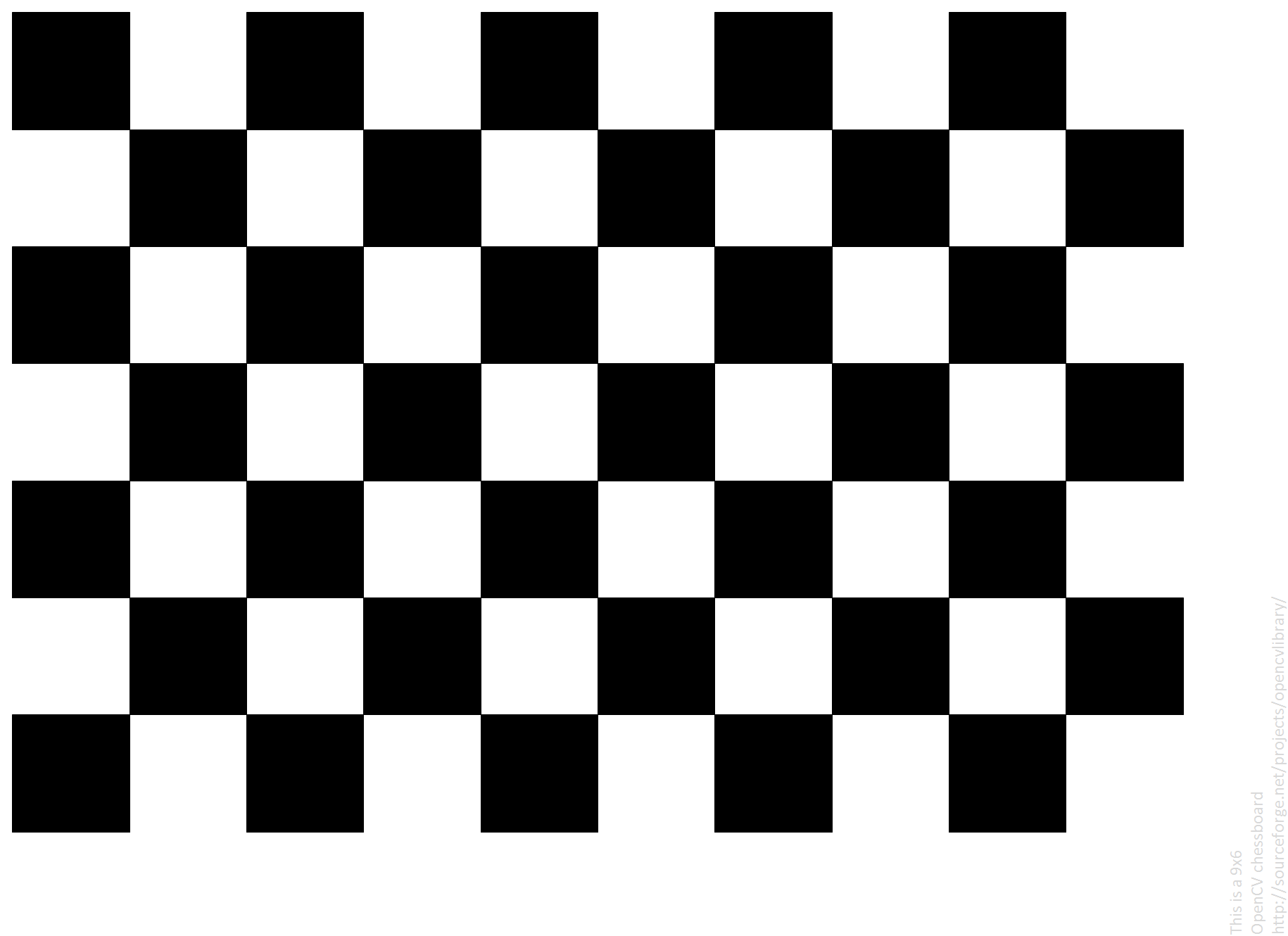
| 棋盘格标定板(可选) | 1个 | 规格:9×6 内角点(可用手机屏幕显示) |
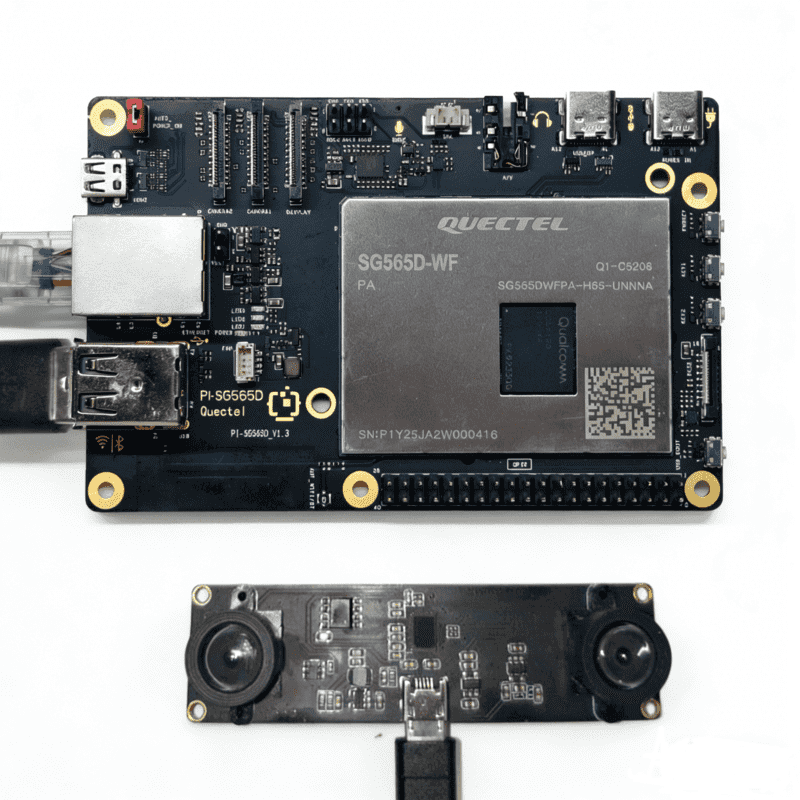
配件实物参考
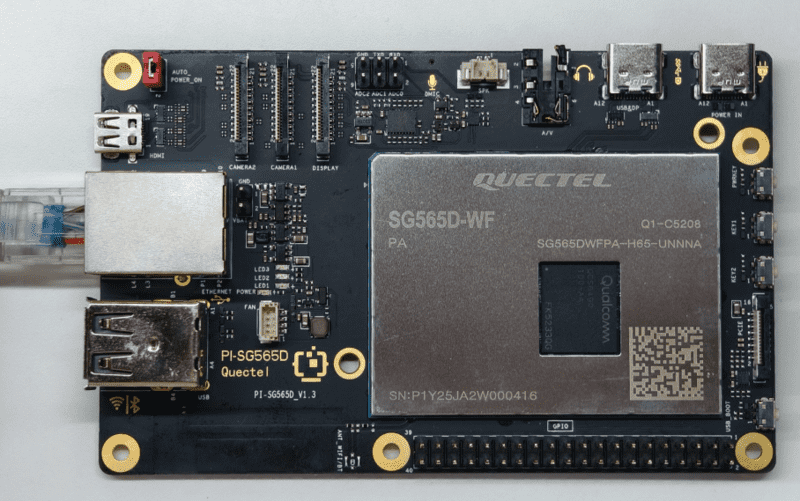
Quectel套件
双目摄像头
棋盘标定板
开发准备
Quectel Pi H1 智能主控板出厂默认搭载 Debian 13 系统镜像,因此无需再次烧录镜像,仅需按照如下步骤操作即可。
硬件连接
显示连接
将 HDMI 线一端接入智能主控板的 HDMI 接口,另一端接入显示器的 HDMI 接口。
输入设备连接
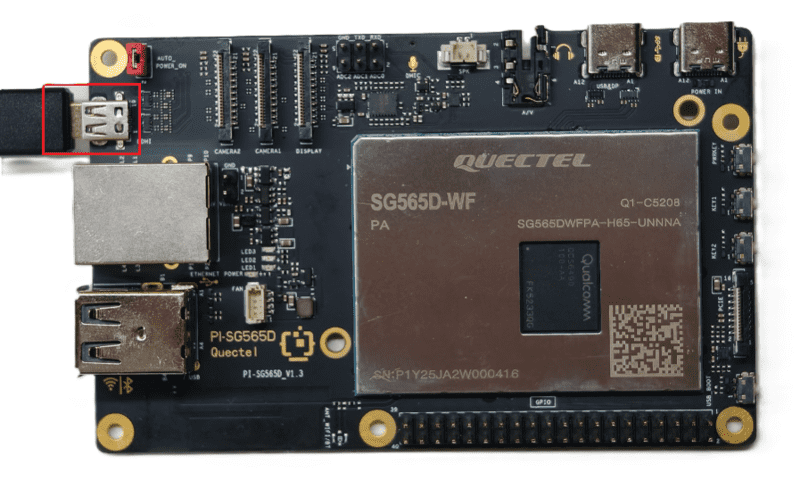
将 USB 键盘、鼠标接入智能主控板的两个 USB-A 接口上,若用无线输入设备,将接收器插入 USB 口即可。
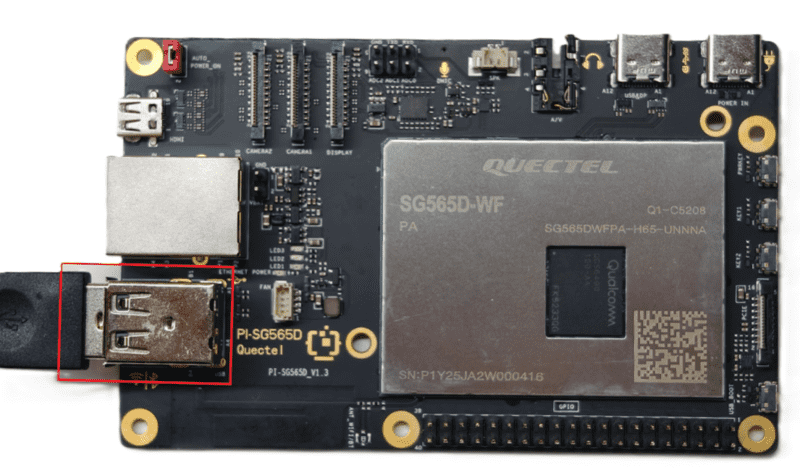
双目摄像头连接
将 USB 双目摄像头接入智能主控板的 USB-A 接口。
网线连接
将网线一端接入智能主控板的千兆网口,另一端接入路由器的网口(确保路由器已联网)。
电源连接
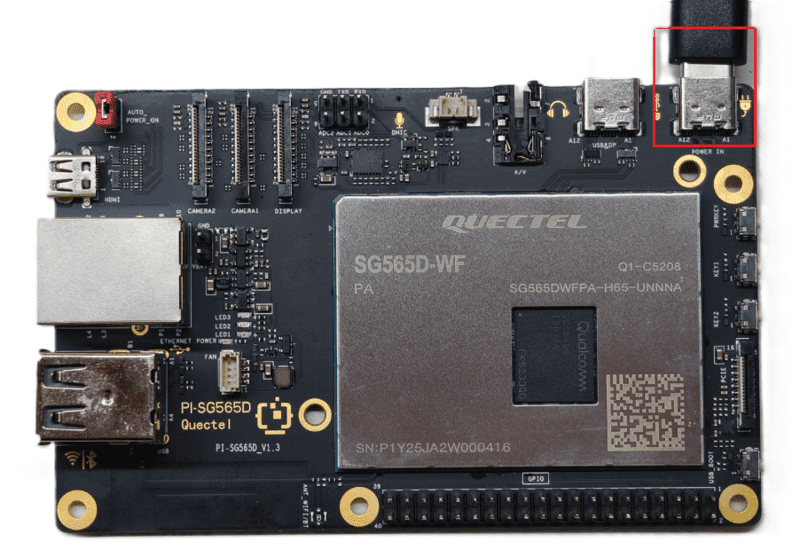
将 USB-A 电源线的 USB-A 端接入电源适配器,USB-C 端接入智能主控板的电源口(通常标注 POWER IN )。
项目实现
安装前置
确认有网络连接后,打开终端输入命令:
上述命令将更新软件源并安装项目运行所需的一些库,具体包括:
- v4l-utils:提供
v4l2-ctl等摄像头工具,用于读取和设置摄像头参数; - python3-pip:Python 包管理器,用于安装项目依赖。
获取代码
下载代码后,将代码解压到设备。
安装 Python 依赖
依赖包说明:
- PySide6:Qt6 的 Python 绑定,用于构建图形用户界面;
- opencv-python:OpenCV 图像处理库,用于摄像头采集、图像处理和立体视觉计算;
- numpy:数值计算库,用于矩阵运算和标定参数处理。
采集标定图像
运行标定图像采集工具:
程序会自动检测双目摄像头并显示预览画面,按照提示操作:
- 将棋盘格标定板放置在摄像头前方不同位置和角度
- 按
s键保存当前图像对(建议采集 15-20 对) - 按
q键退出采集程序
生成标定参数
采集完成后,运行标定参数生成工具:
程序会自动读取标定图像并计算双目标定参数,生成 tools/stereo_calib_params.npz 文件。
运行测距应用
完成标定后,运行主程序:
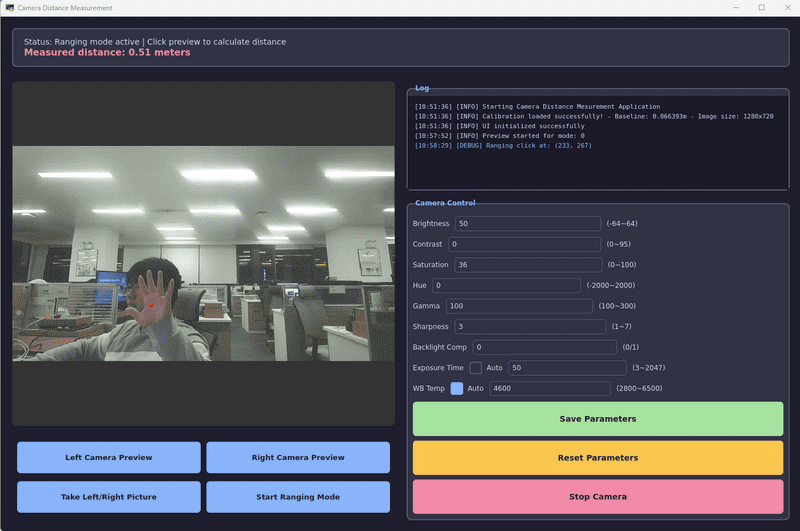
程序启动后将显示图形界面,提供以下功能:
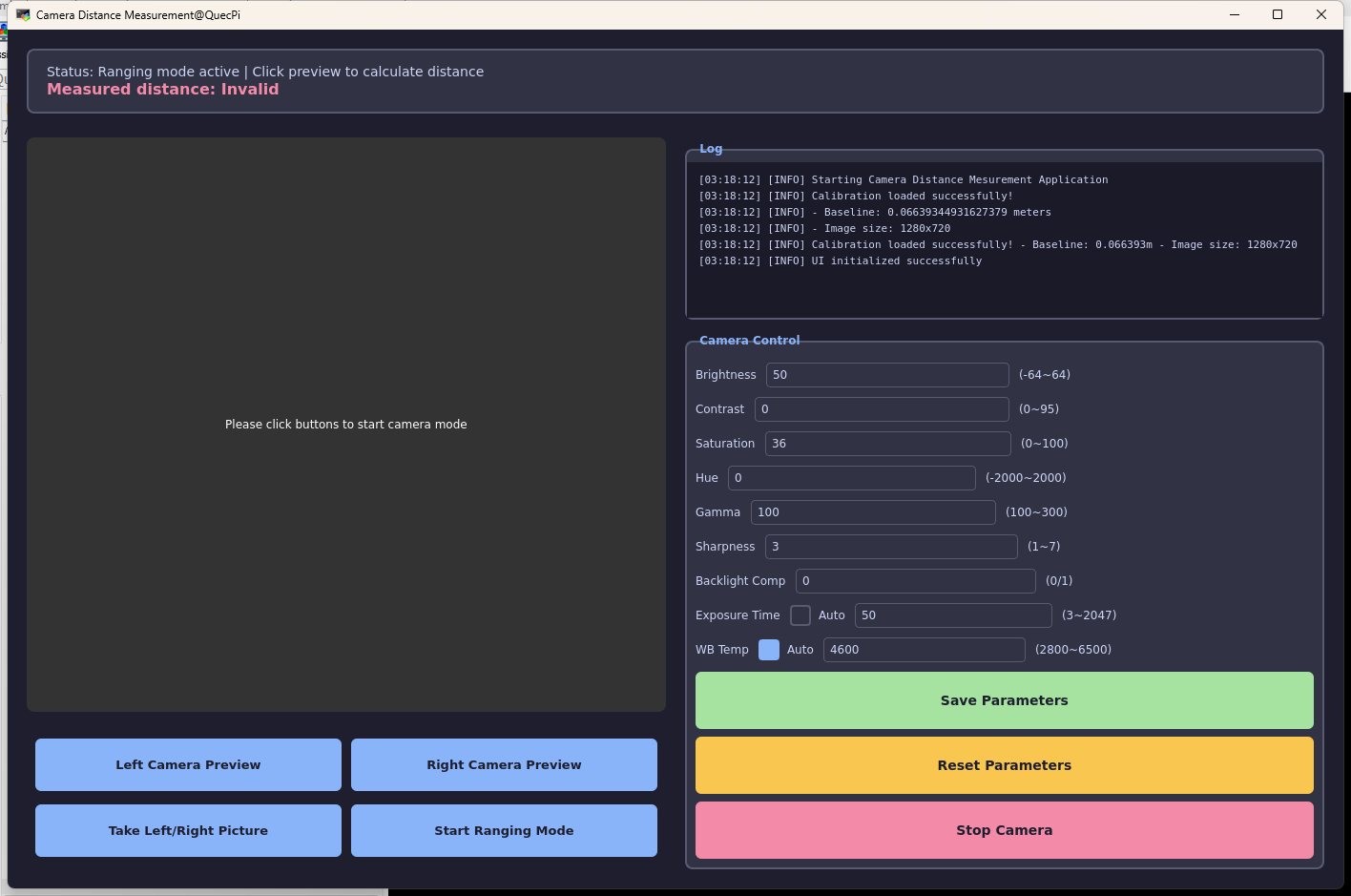
功能按钮说明
| 按钮 | 功能说明 |
|---|---|
| Left Camera Preview | 左摄像头单独预览,观察画面 |
| Right Camera Preview | 右摄像头单独预览,观察画面 |
| Take Left/Right Picture | 双目拍照,检查左右画面是否存在偏移,有偏移说明双目摄像头工作正常 |
| Start Ranging Mode | 进入测距模式,点击预览画面即可测量目标距离 |
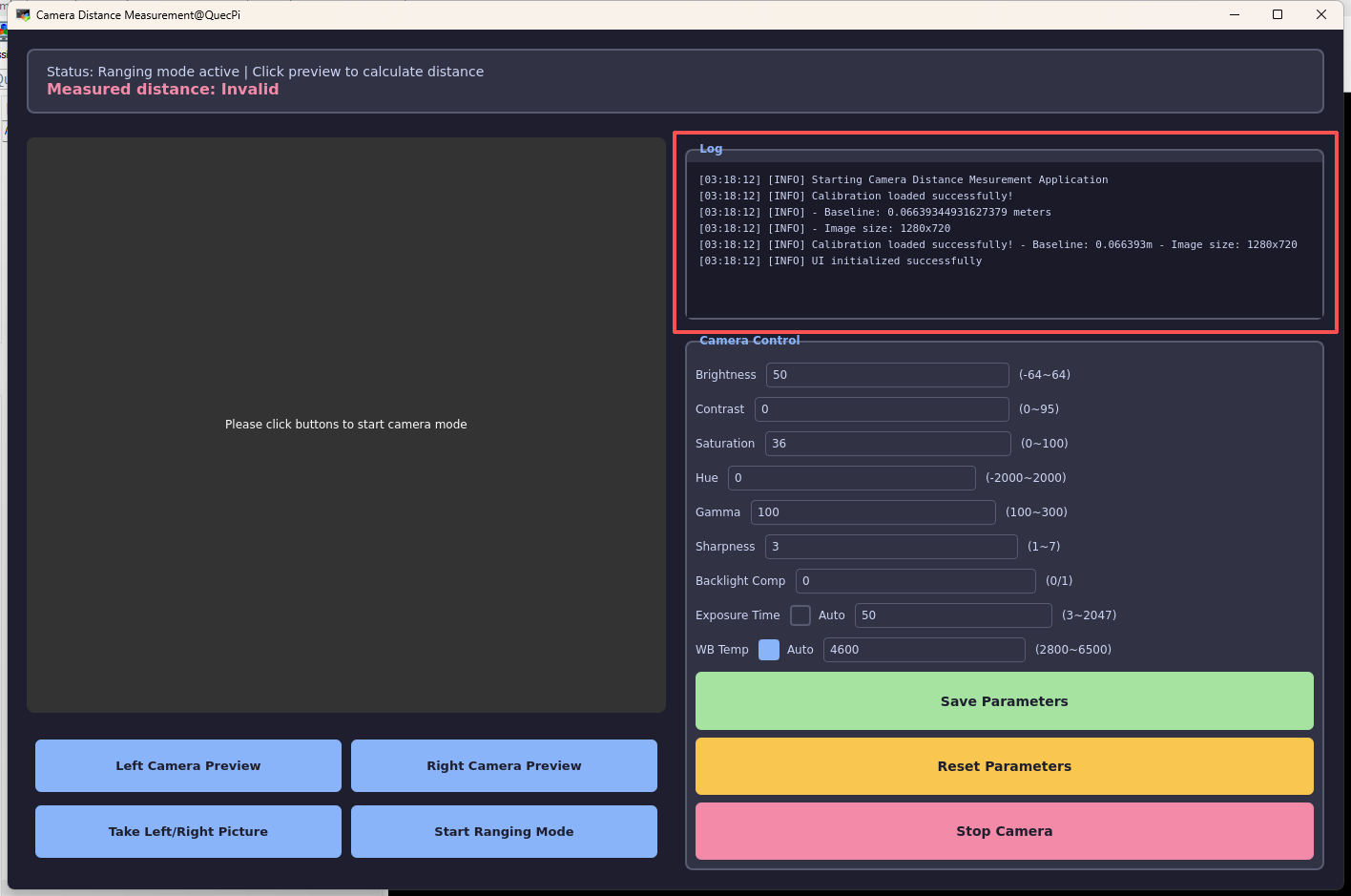
日志显示区域
右侧上方区域可输出应用运行过程中的日志信息。
摄像头参数调节
程序右侧提供摄像头参数调节面板,可调节以下参数(也可根据具体摄像头可调节参数设置范围):
| 参数 | 说明 | 范围 |
|---|---|---|
| Brightness | 亮度 | -64 ~ 64 |
| Contrast | 对比度 | 0 ~ 95 |
| Saturation | 饱和度 | 0 ~ 100 |
| Hue | 色调 | -2000 ~ 2000 |
| Gamma | 伽马值 | 100 ~ 300 |
| Sharpness | 锐度 | 1 ~ 7 |
| Backlight Comp | 背光补偿 | 0 / 1 |
| Exposure Time | 曝光时间 | 3 ~ 2047 |
| WB Temp | 白平衡色温 | 2800 ~ 6500 |
进行测距
- 点击 "Start Ranging Mode" 进入测距模式
- 在预览画面上点击目标位置
- 等待距离计算结果显示在顶部提示栏