
跌倒警报设备
该应用是一个基于 Quectel Pi H1 智能主控板,通过 USB 摄像头进行实时人体姿态识别,采用 YOLOv8-Pose 和多人跌倒分类器,自动检测用户是否发生跌倒事件的智能应用。
该项目通过调用摄像头实时采集画面,当检测到跌倒事件时会启动本地报警器并发送通知到手机,用户通过手机 App 查看跌倒图片,可作为老年人/患者安全监护、跌倒预警系统的参考示例。
- 案例描述
- 资源准备
- 快速上手
- 应用演示
该应用是一个基于 Quectel Pi H1 智能主控板,通过 USB 摄像头进行实时人体姿态识别,采用 YOLOv8-Pose 和多人跌倒分类器,自动检测用户是否发生跌倒事件的智能应用。
该项目通过调用摄像头实时采集画面,当检测到跌倒事件时会启动本地报警器并发送通知到手机,用户通过手机 App 查看跌倒图片,可作为老年人/患者安全监护、跌倒预警系统的参考示例。
开发配件清单
| 配件名称 | 数量 | 规格参数 |
|---|---|---|
| Quectel Pi H1 智能主控板 | 1块 | Quectel Pi H1智能主控板 |
| USB 摄像头 | 1个 | 推荐分辨率:1280×720或更高;输出格式:MJPG/YUYV |
| USB-C 电源线充电器 | 1个 | 27W USB Type-C接口充电器 1.2米线长中规电源PD电源 适用于树莓派5代 |
| USB-C DP 显示线/HDMI 线 | 1根 | 规格:DP 1.4;线长:1m;接口:USB-C(公头)- USB-C(公头) 规格:HDMI 2.0;线长:1m;接口:HDMI-A(公头)-HDMI-D(公头) |
| CPU 散热风扇(可选) | 1个 | 树莓派5代官方原装散热器带导热贴 |
| 显示屏 | 1个 | 24英寸HDMI显示器 |
| USB可编程警报灯(可选) | 1个 | 通过串口(/dev/ttyUSB0)控制的LED警报灯 |
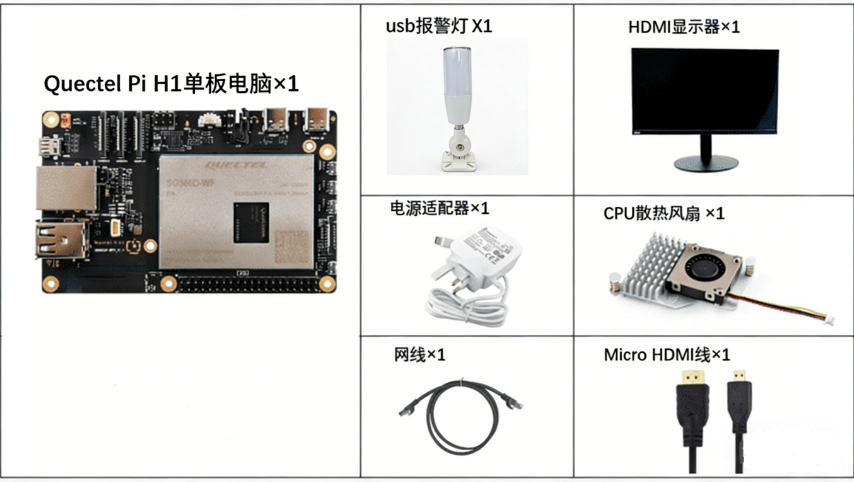
配件实物参考
Quectel套件
开发准备
Quectel Pi H1 智能主控板出厂默认搭载 Debian 13 系统镜像,因此无需再次烧录镜像,仅需按照如下步骤操作即可。
硬件连接
显示连接
将 HDMI 线一端接入智能主控板的 HDMI 接口,另一端接入显示器的 HDMI 接口。
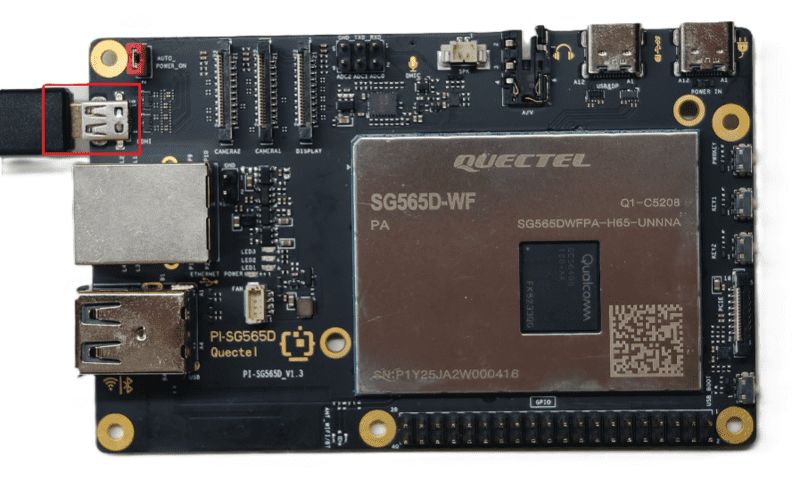
输入设备连接
将 USB 键盘、鼠标接入智能主控板的两个 USB-A 接口上,若用无线输入设备,将接收器插入 USB 口即可。
网线连接
将网线一端接入智能主控板的千兆网口,另一端接入路由器的网口(确保路由器已联网)。
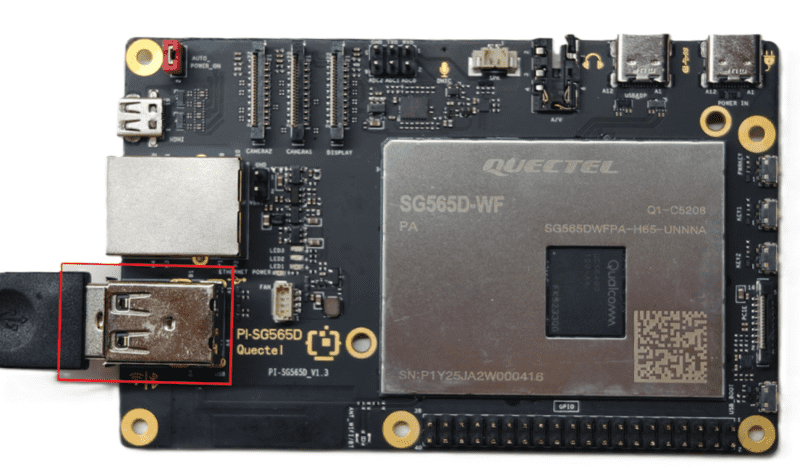
USB 警报灯连接(可选)
使用 USB 线将警报灯与智能主控板的空闲 USB 接口连接(可根据购买的警报灯的文档操作)。
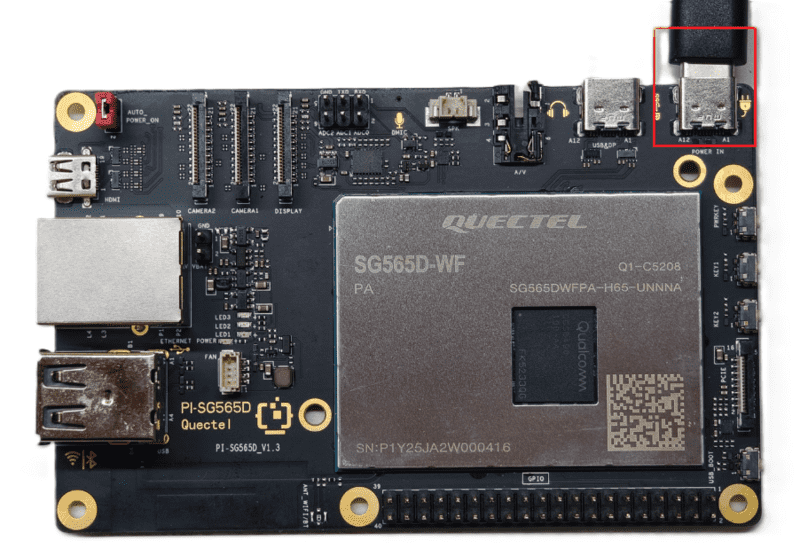
电源连接
将 USB-A 电源线的 USB-A 端接入电源适配器,USB-C 端接入智能主控板的电源口(通常标注 POWER IN )。
项目实现
安装前置
确认有网络连接后,打开终端输入命令:
上述命令将更新软件源并安装项目运行所需的一些库,具体包括:
- python3-pip:Python 包管理器,用于安装项目依赖。
- libatlas-base-dev 和 libjasper-dev:支持科学计算库的依赖。
获取代码
安装 Python 依赖
依赖包说明:
- PySide6:Qt6 的 Python 绑定,用于构建图形用户界面;
- opencv-python:OpenCV 图像处理库,用于摄像头采集和图像处理;
- ultralytics:YOLOv8 目标检测框架,用于人体关键点检测;
- numpy:数值计算库,用于矩阵运算和特征提取;
- scikit-learn:机器学习库,用于提供随机森林分类器;
- joblib:序列化库,用于加载预训练模型。
准备模型文件
跌倒检测应用需要预加载以下模型文件,请放置在 model/ 目录下:
- yolov8n-pose.pt - YOLOv8-Nano Pose 模型,用于检测人体17个关键点
- fall_multi_person_model.pkl - 随机森林分类器,用于判断是否跌倒
- feature_scaler_multi.pkl - 特征缩放器,用于标准化输入特征
这些模型文件可以从以下方式获取:
- yolov8n-pose.pt:从 Ultralytics 官方 GitHub 下载或通过代码自动下载
- fall_multi_person_model.pkl 和 feature_scaler_multi.pkl 已放置model目录下
运行应用
完成模型准备后,运行主程序:
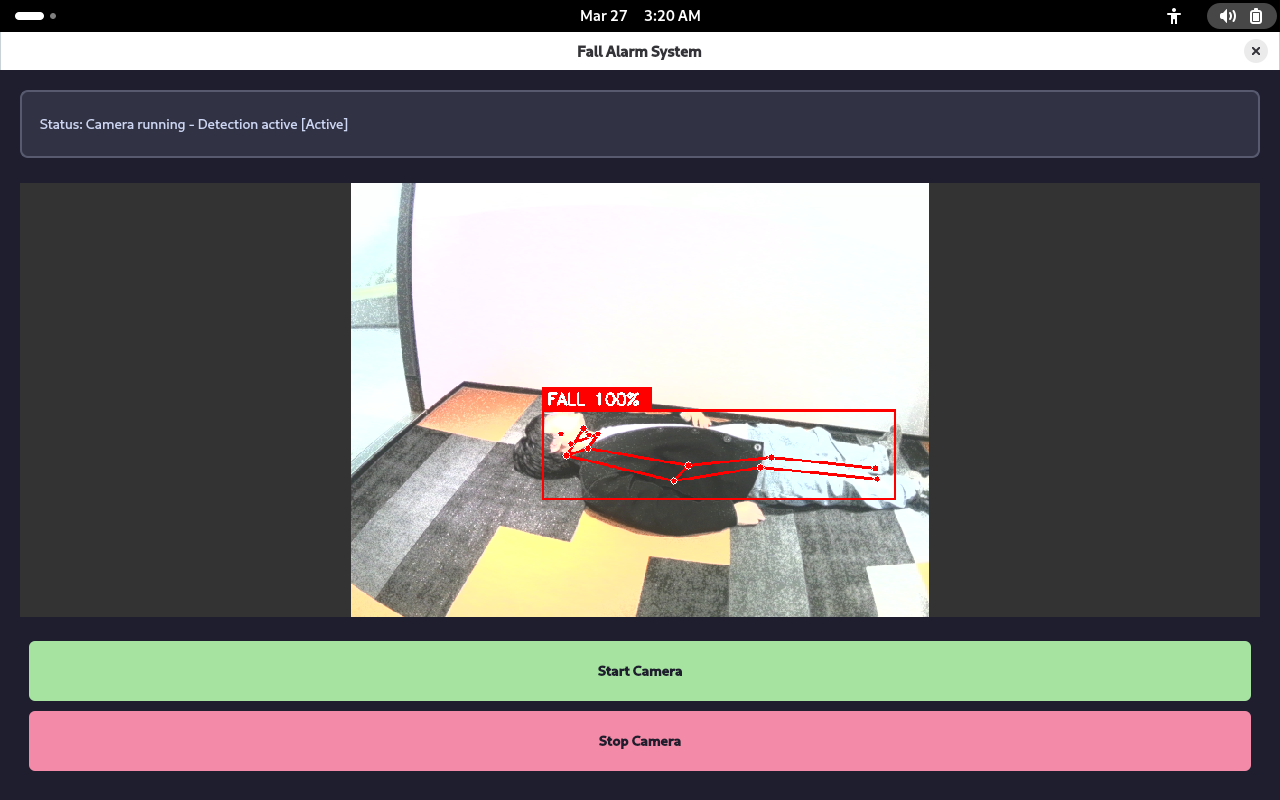
程序启动后将显示图形界面,提供以下功能:
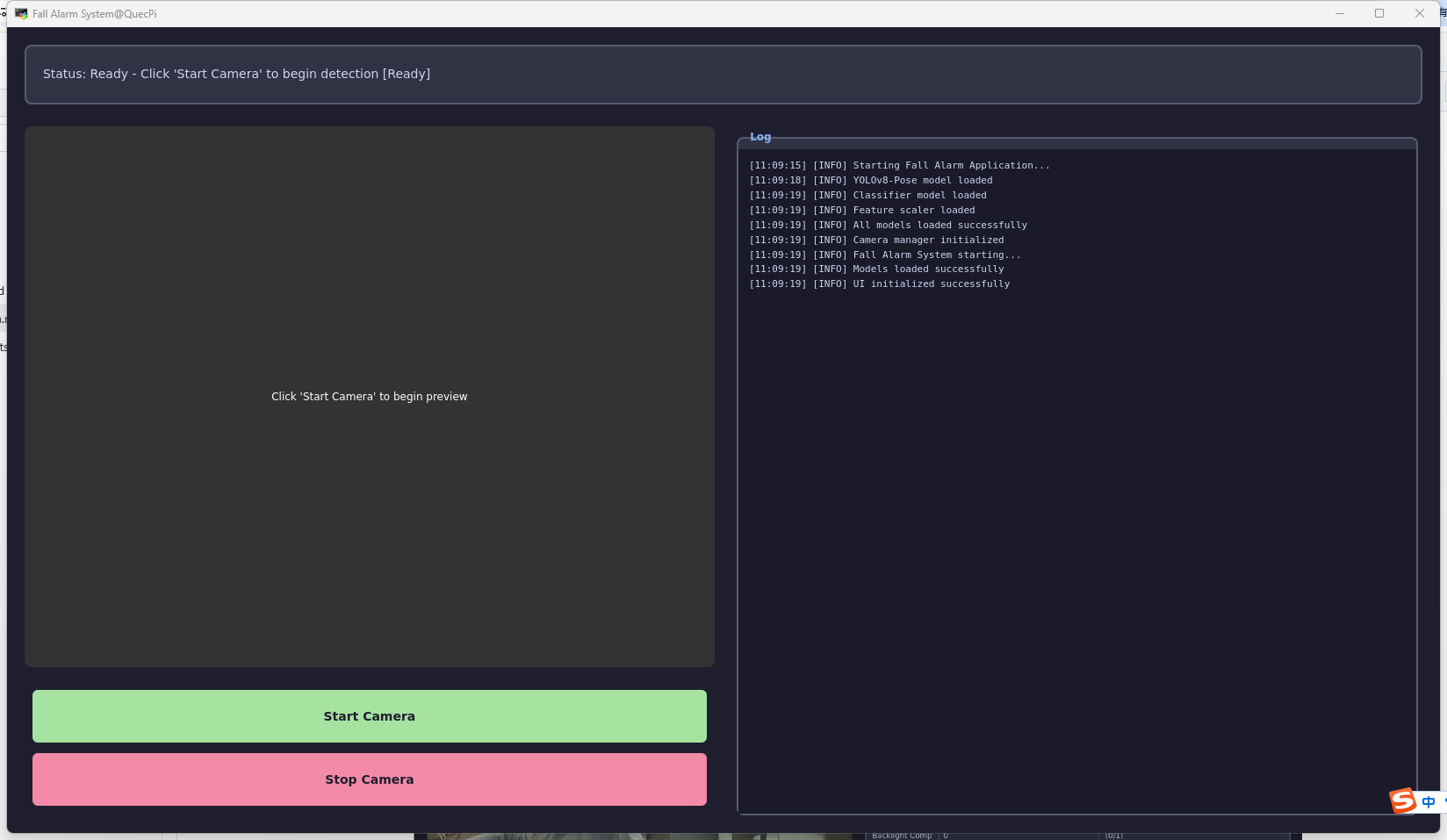
功能界面说明
| 界面区域 | 功能说明 |
|---|---|
| 摄像头预览区域 | 实时显示摄像头采集的画面,标注检测到的人体和跌倒状态 |
| 日志输出区域 | 显示应用运行过程中的实时日志和检测信息 |
| 跌倒警报提示 | 在顶部显示跌倒检测结果,自动触发警报灯并保存报警图片 |
| 相机选择 | 支持多个 USB 摄像头,可自动检测并选择可用摄像头 |
日志显示区域
右侧区域可输出应用运行过程中的日志信息,包括:
- 模型加载日志:显示是否成功加载 YOLOv8 模型和分类器
- 检测日志:显示检测到的人体数量和跌倒状态
- 警报日志:显示跌倒警报和图片上传状态
实时检测参数
程序使用以下参数进行跌倒检测(可根据实际需求调整):
| 参数 | 说明 | 默认值 |
|---|---|---|
| MIN_CONFIDENCE | 关键点置信度阈值 | 0.4 |
| MIN_KEYPOINTS | 有效关键点最少数量 | 10 |
| FALL_BODY_ANGLE_THRESHOLD | 身体倾角阈值 | 55° |
| FALL_HEIGHT_RATIO_THRESHOLD | 身体高宽比阈值 | 1.2 |
| FALL_MIN_CONFIDENCE | 分类器置信度阈值 | 0.75 |
| FALL_CONFIRM_FRAMES | 跌倒确认帧数 | 3 |
| DETECT_INTERVAL | 检测间隔(秒) | 0.15 |
跌倒检测原理
关键点检测
应用使用 YOLOv8-Pose 模型检测人体17个关键点:
特征提取
从关键点提取以下特征用于分类:
- 关键点坐标:17个关键点的(x, y)坐标和置信度,共51维
- 身体角度:计算8个关键点之间的角度特征,共8维
- 相对坐标:相对于髋部中心点的相对坐标,共26维
- 身体形态:身体高度、宽度及高宽比,共3维
跌倒判断逻辑
应用使用多种方法判断是否发生跌倒:
判断标准:
- 随机森林分类器概率 > 0.75 且连续3帧检测到跌倒
- 或者同时满足身体角度 > 55° 且身体高宽比 > 1.2
警报和查看
当检测到跌倒时,应用会:
- 启动警报灯:通过串口向警报灯设备发送闪光和报警命令
- 保存报警图片:在
picture/目录保存包含时间戳的 JPEG 图片 - 上传服务器:将报警图片上传到指定服务器地址
- 上传地址:
http://SERVER_IP:8000/upload_fall(可自行替换服务器地址和上传接口) - 支持后台异步上传,不阻断主程序运行
- 上传地址:
- App 端查看:可通过手机 App 实时接收跌倒通知,并查看报警图片